Intuitive Robotic Plastering
‘Human-machine Collaboration’
@ETH Zurich
Gramazio Kohler Research
Team: MAS 2020-21
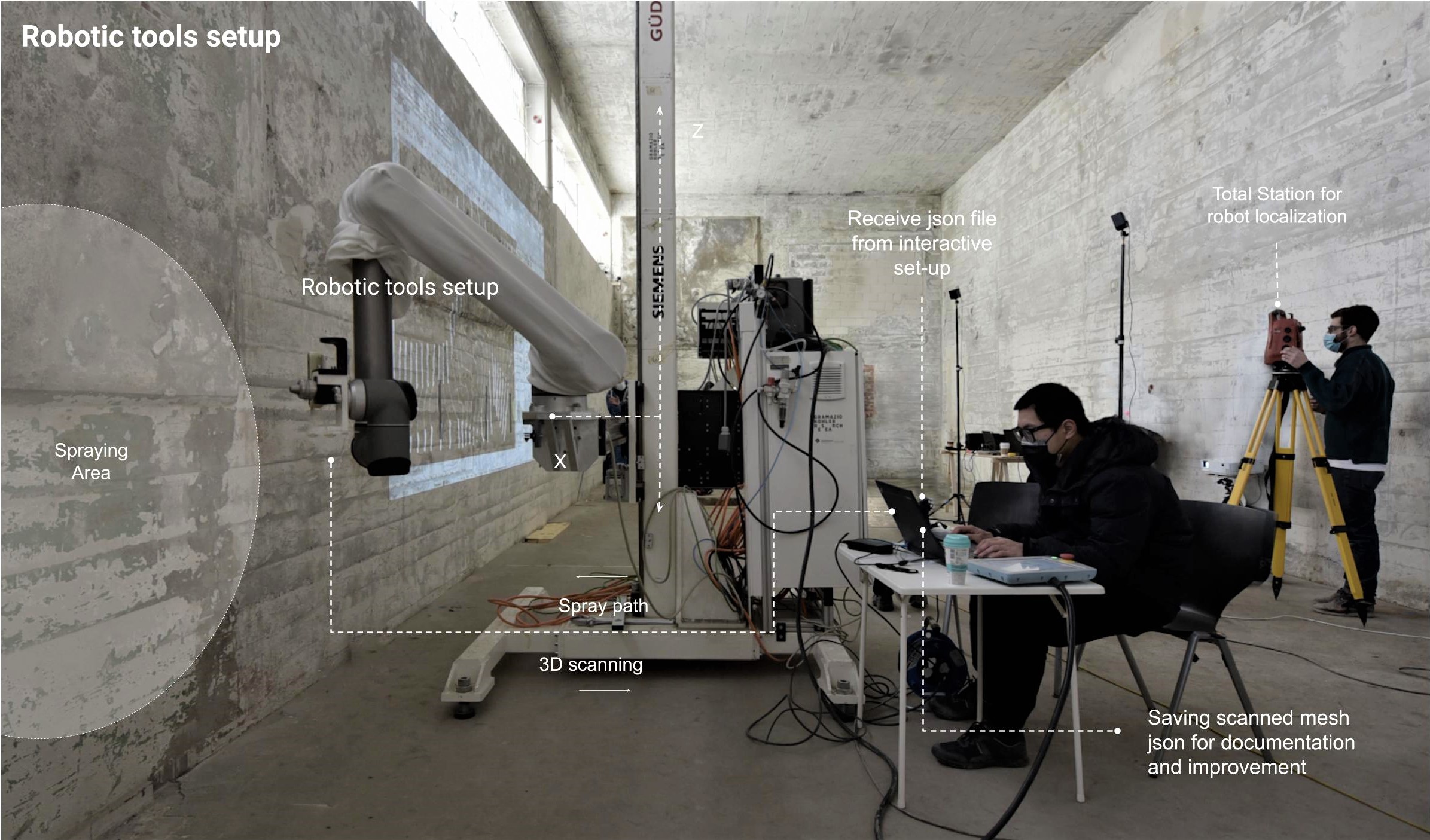
This 11-week project explores the potential of novel digital fabrication processes to implement a full-scale construction project. The topic combines two PhD research projects on Robotic Plaster Spraying and Human-Machine Collaboration to propose new design and fabrication methodologies under the name of Intuitive Robotic Plastering.
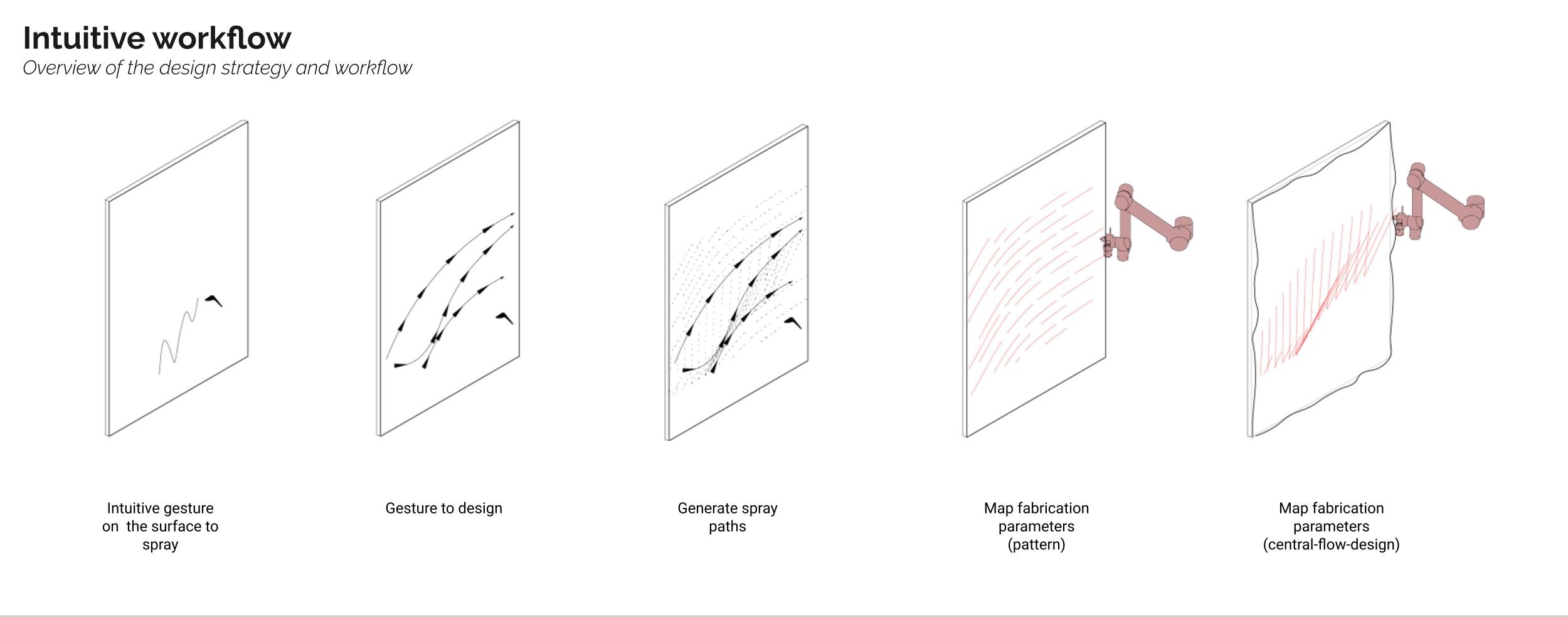
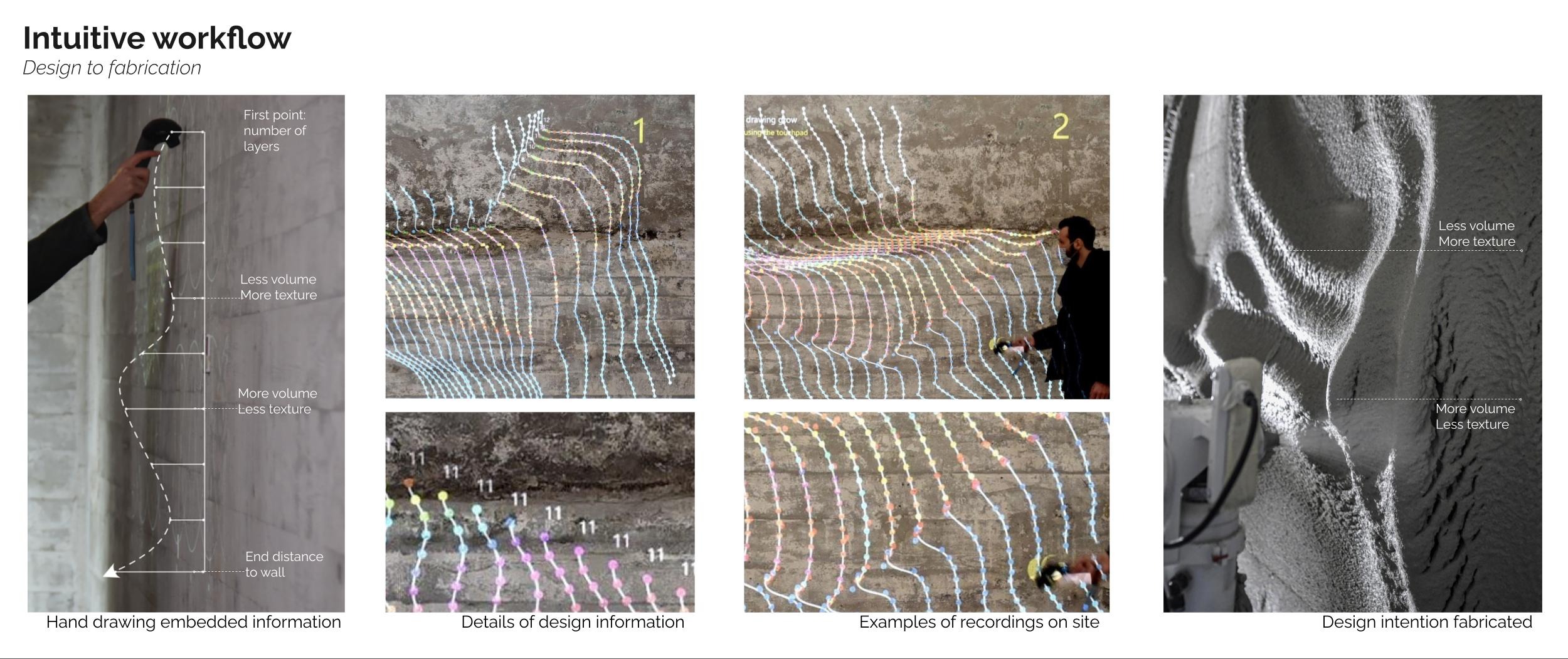
The final results show the design and construction of an interior space through an adaptive thin layer printing process with an interactive design procedure.
Amorphous material fabrication strategies
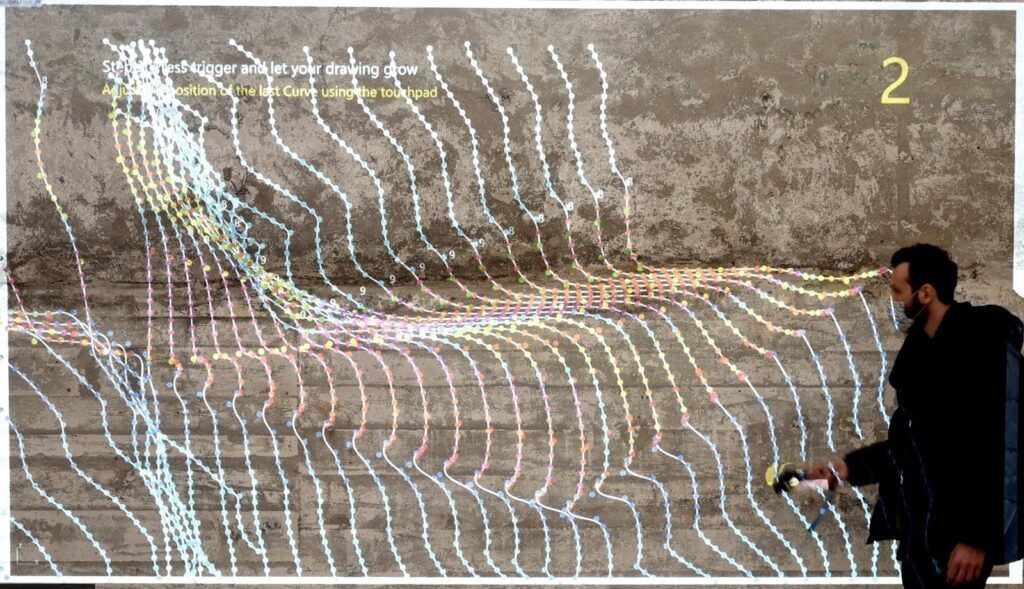
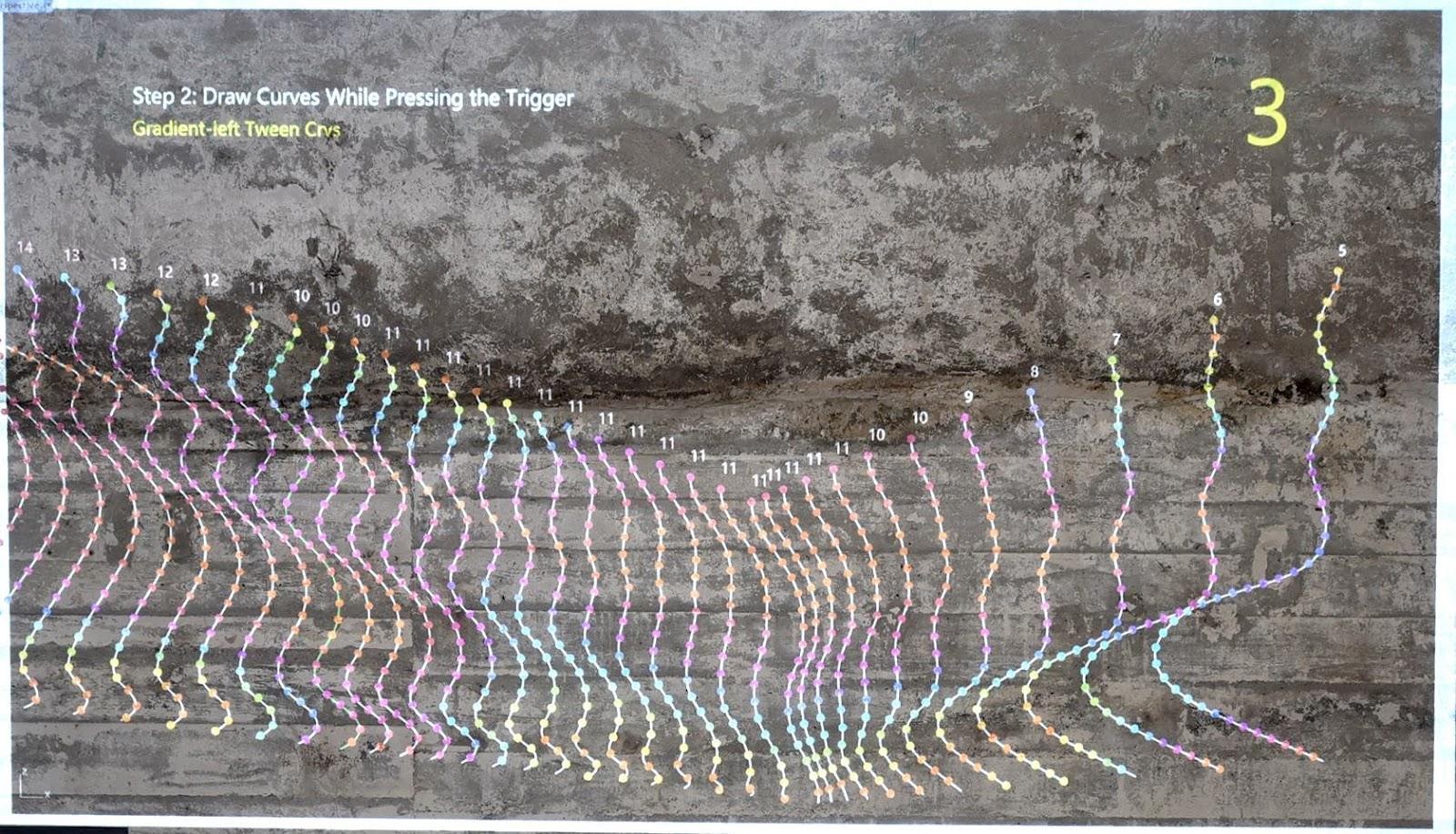
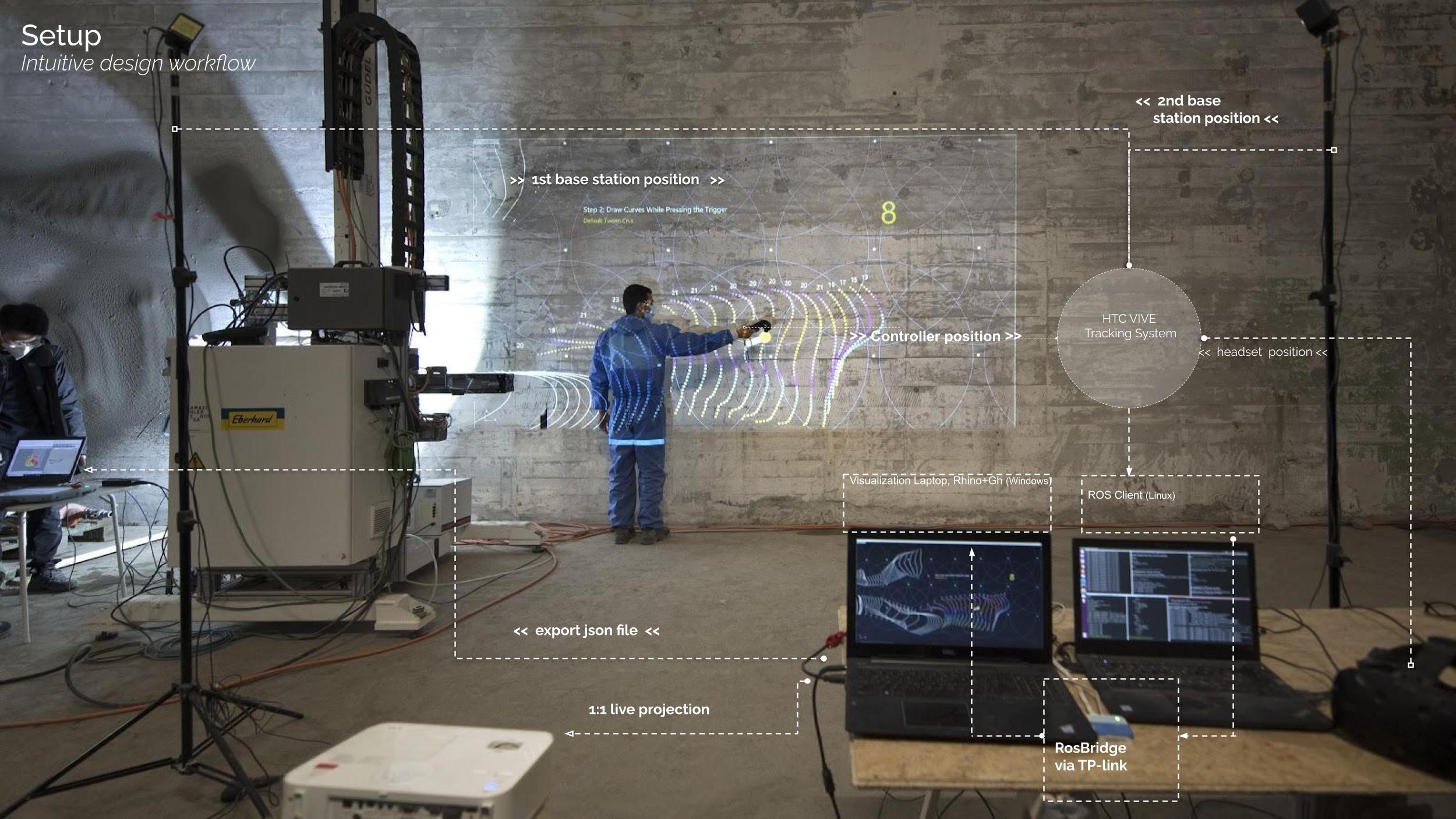
Interaction design – XR Communication
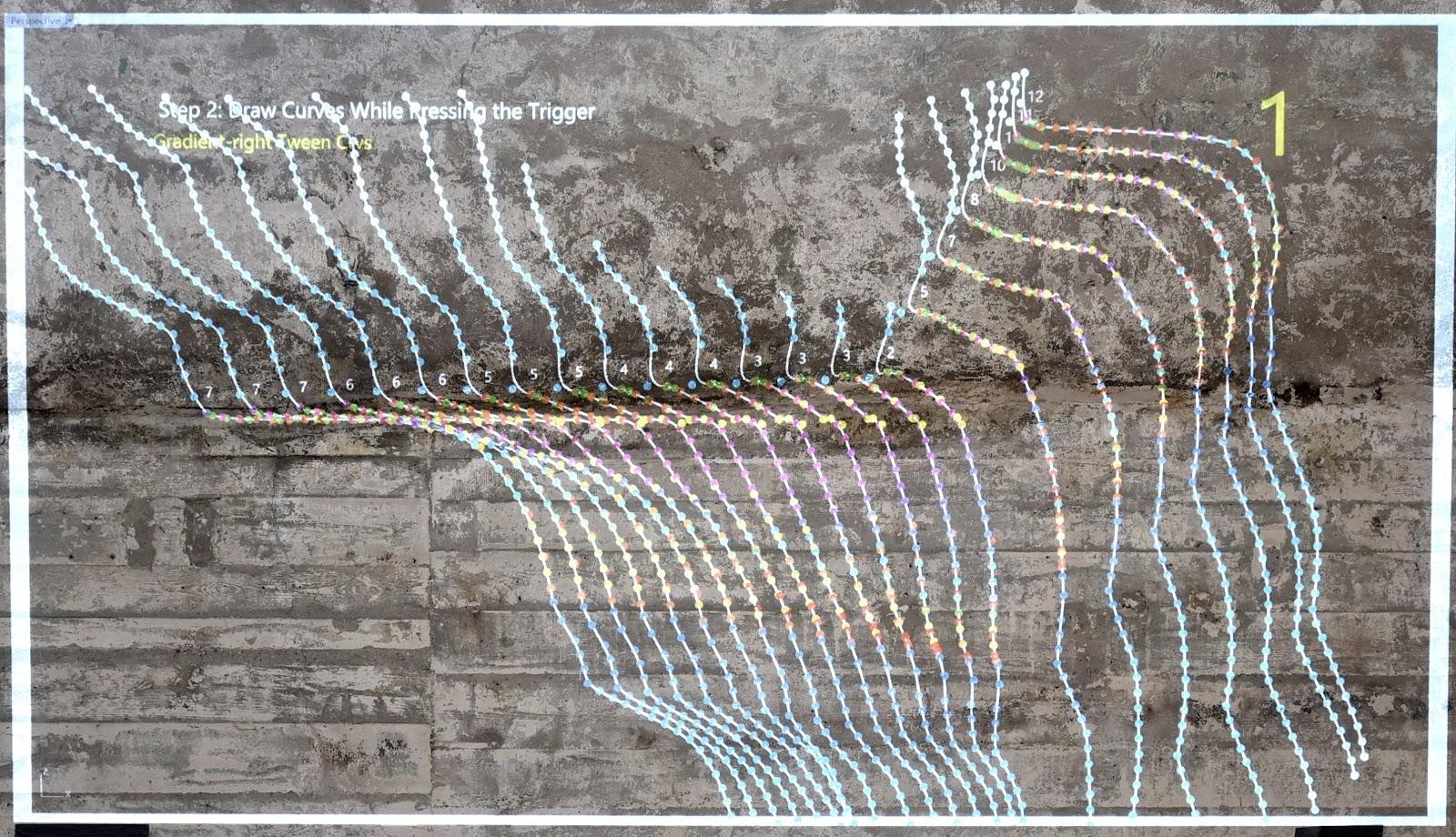
Hand gesture capturing and filtering strategies
Digital process chronology
Tools used:
UR 10 robotic arm
HTC Vive
Projection mapping
Grasshopper
ROS
COMPAS framework
Siemens Dual axis
Anybotics ANYmal
Intel Realsense D435

Robotic fabrication process
As more global problematics, this project has been for us a constant interrogation on the position and role of human interaction on-site in a digital and automated production environment.
In that sense plaster represent for our group a material allowing us to experiment between a pragmatic approach of “how to apply plaster on a wall’ and the very sensible question of “ how to create a new digital materiality with a true sensible expression” taking in accounts precedents works and looking ahead to improve this research